CamiTK 
Computer Assisted Medical Intervention ToolKit
Save time, focus on your expertise!
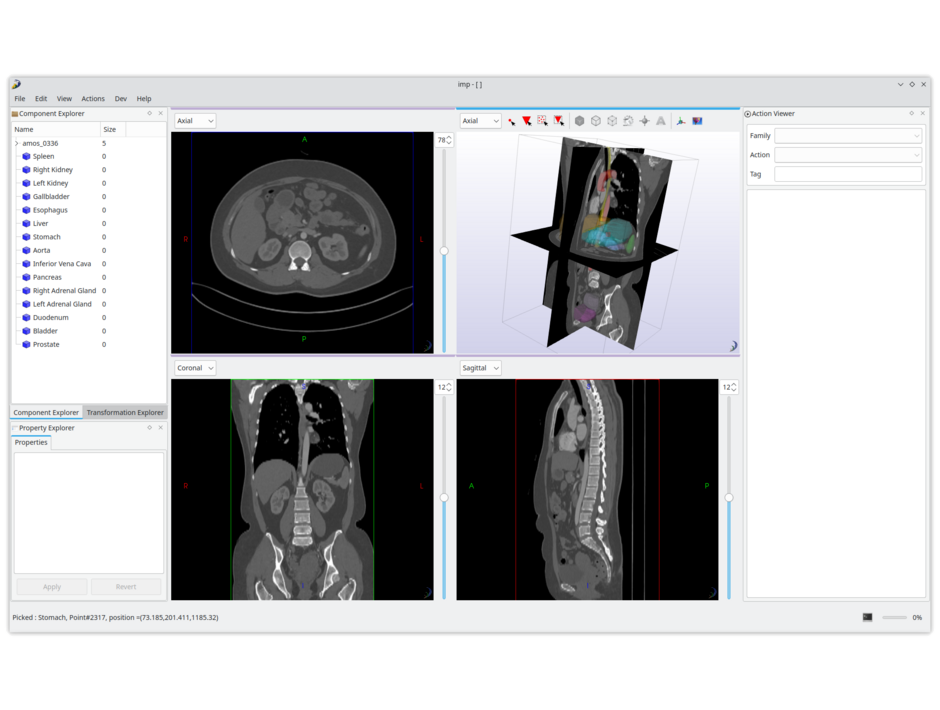
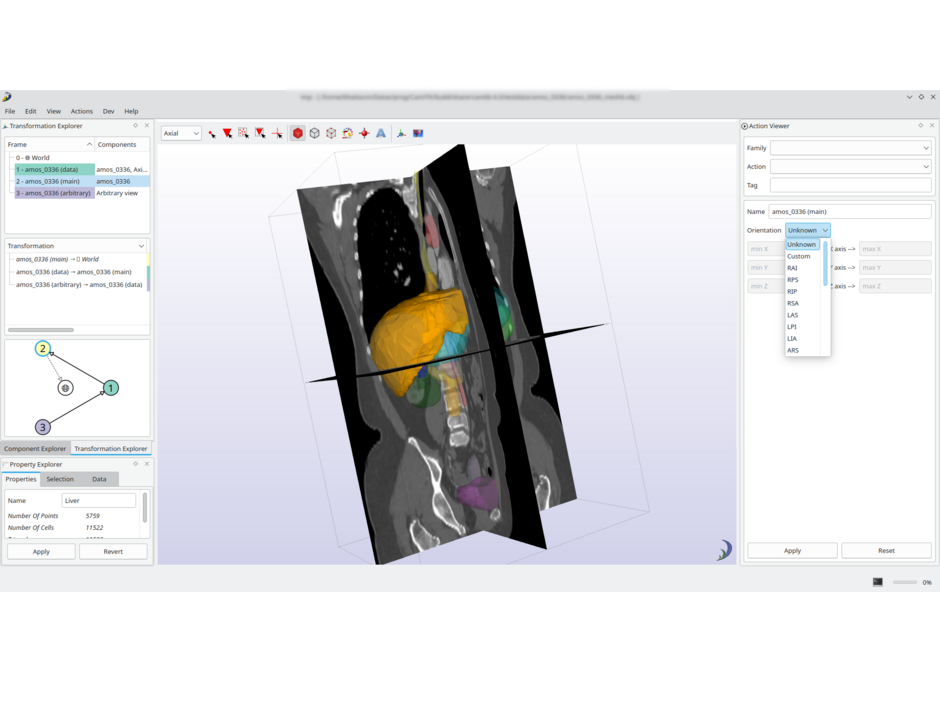
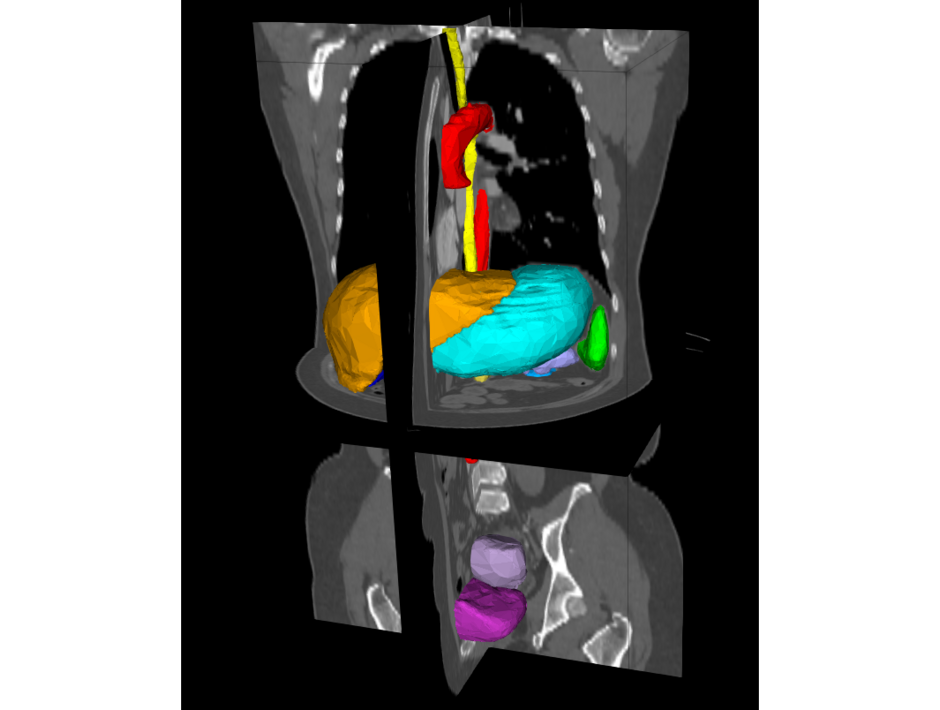
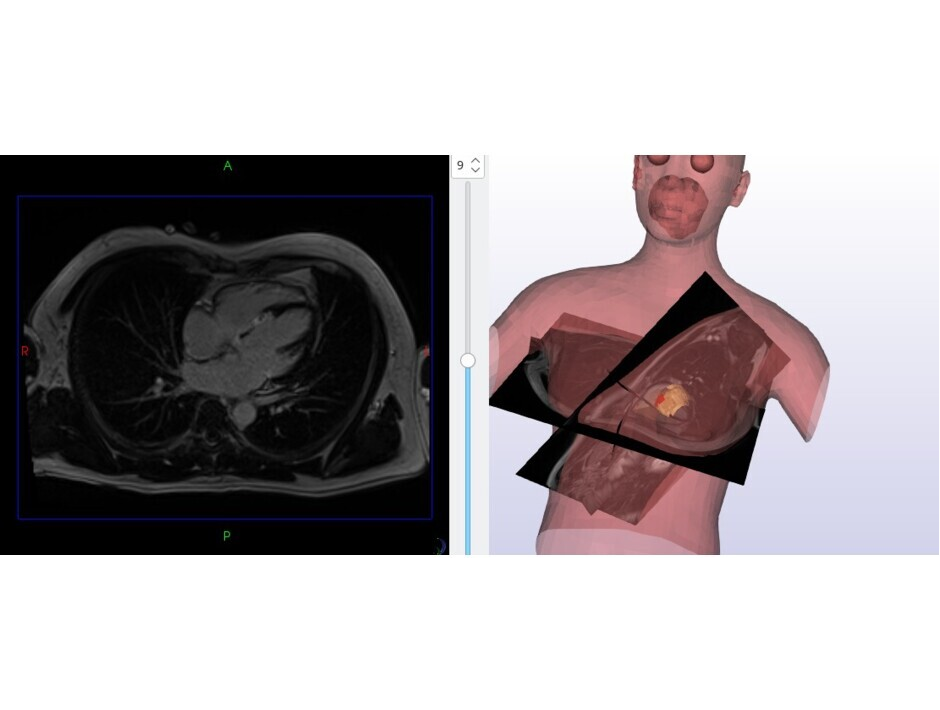
Visualization and interaction
Image and mesh processing
Develop Python extensions
Browse the extension catalog
Integrating Expertise Across Research Domains
CamiTK avoids reinventing the wheel by gathering the knowledge and know-how from several research fields
Interaction
Processing
Analysis
Interaction
Biomechanics
Navigation
Robot Control
Prototype medical apps
CamiTK provides fast and stable tools for prototyping medical applications for clinicians and the medical industry.
Fast technological transfer
Thanks to its architecture, CamiTK allows fast technological transfer between students, PhD, research scientists, clinicians and industrial partners.
Easy integration of algorithms, data, and devices
CamiTK provides simple ways to integrate and validate new algorithms (in C++ and Python) with already existing tools. It follows a Component-Based Software Engineering design where data types, algorithms, sensors, viewers and user interaction are made available by extensions (plugins).
Free and open source
Written in C++
Free to use
open source 
Well documented
Cross platform
CamiTK is based on open-source cross-platform libraries (such as Qt for the user interface and VTK for the visualization) and builds with cmake: several platforms are supported, including Windows and Linux.
Contributions welcome!
New users are always welcome. All the CamiTK Community Edition source code is managed on gitlab, ready for anyone to participate.
Please cite CamiTK!
If you are using CamiTK, and especially if you publish scientific papers, please cite our paper (free preprint)... and let us know!
It will help us to get more funds to improve CamiTK and your publication will be referenced in the publication section of this website.
Note: when citing CamiTK, please do not use a footnote with the URL, but cite this paper as a full reference.
Sponsors
We are grateful for the support and funding provided by the following organisations